Nhóm tác giả Trường Đại học Bách khoa TPHCM đã nghiên cứu thử nghiệm thành công và làm chủ công nghệ robot ngầm tự hành, với độ chính xác cao và linh động, có thể phục vụ quan trắc môi trường, khảo sát nông hộ, cứu hộ cứu nạn...
Thay thế con người làm việc trong môi trường nguy hiểm
TS Tôn Thiện Phương, thành viên nhóm nghiên cứu cho biết, tình trạng ô nhiễm nguồn nước ở Việt Nam đang trở nên ngày càng nghiêm trọng. Các công nghệ quan trắc môi trường nước hiện nay dù trực tiếp hay gián tiếp vẫn có sự tham gia của con người trong hầu hết mọi hoạt động khảo sát, dẫn đến tốn công sức và thời gian.
Ngoài ra, các phương pháp này chưa phản ánh chính xác mức độ chất lượng nước ứng với từng vị trí, khu vực muốn khảo sát do hành trình đo được điều khiển bởi thuyền có người lái khó đạt đến vị trí cần khảo sát (như ở những khu vực nước nông, kênh rạch nhỏ, hẹp), số điểm khảo sát ít…
Đối với công tác cứu hộ, cứu nạn, tai nạn đắm tàu hay khảo sát địa hình, bảo trì các công trình, đường ống dẫn dầu ở Việt Nam, đánh giá các công trình thủy lợi, đa phần vẫn do đội ngũ thợ lặn thực hiện. Điều này gây ra nhiều hạn chế cũng như mang rủi ro nhất định tới tính mạng con người.
“Với sự phát triển khoa học công nghệ, các robot ngầm tự hành có thể thay thế con người làm việc trong môi trường nguy hiểm và giảm chi phí. Đồng thời, robot có khả năng khảo sát ở khu vực rộng lớn, con người khó hoặc không khảo sát được, thu thập được nhiều thông tin hơn so với phương pháp truyền thống” - TS Phương nhấn mạnh.
Trong khi đó, trong lĩnh vực tàu ngầm, trên mặt nước, tự động, bán tự động phục vụ cho quan trắc môi trường, cứu hộ cứu nạn… trên thế giới đã nghiên cứu, ứng dụng phổ biến từ lâu. Các robot ngầm tự hành có thể thay thế con người làm việc trong môi trường nguy hiểm và giảm chi phí.
Đồng thời, robot có khả năng khảo sát ở khu vực rộng lớn, con người khó hoặc không khảo sát được, thu thập được nhiều thông tin hiệu quả, chính xác, nhanh hơn so với phương pháp truyền thống.
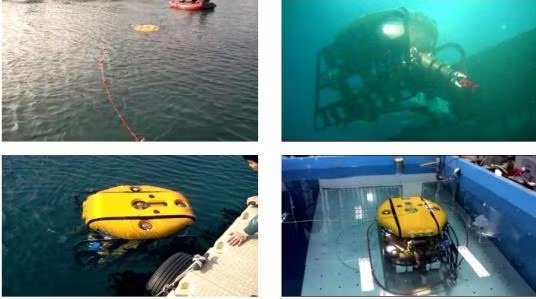
TS Trần Ngọc Huy, thành viên nhóm nghiên cứu cho biết, sau nhiều năm nghiên cứu, thử nghiệm, nhóm nghiên cứu đã cho ra đời các phiên bản robot tự hành trên mặt nước, robot ngầm dưới nước với những phiên bản khác nhau. Đến nay, các phiên bản này đã hoàn thiện cả về công nghệ và chế tạo.
Robot tự hành trên không và dưới nước
Nhóm nghiên cứu cho biết, nhóm đã chế tạo thành công 3 sản phẩm robot khác nhau phục vụ các nhu cầu nêu trên.
Cụ thể, robot không người lái vận hành trên mặt nước (USV), được coi là phương tiện hiện đại ngày nay giúp cho con người khám phá nhiều hơn về môi trường nước, đặc biệt là biển. USV ứng dụng trong thực tế để nghiên cứu và giám sát môi trường (khí tượng, thủy văn học…) như lấy mẫu nước, lập bản đồ, tuần tra, trinh sát, trung chuyển thông tin, vận tải thiết bị. USV có thể mang vũ khí và đa dạng tác vụ cho mục đích quân sự.
Ngoài ra, USV còn có thể kết hợp với robot khác tạo thành hệ thống tự động tự hành cho các tác vụ lớn cả trên không và dưới nước. USV được nhóm chế tạo có các phiên bản VIAM-USV1000, VIAM-USV1500, VIAM-USV2000, có khối lượng từ 23 – 150kg; tốc độ tối đa 4 knots (1 knot = 1,852 km/h), kích thước từ 1,1 – 2m (dài) x 0,5 – 1m (rộng) x 0,2 – 0,35m (cao). Thiết bị điều khiển bằng phím chức năng, dễ dàng chuyển đổi giữa các chế độ điều khiển tự động và bằng tay.
Robot ngầm điều khiển từ xa (ROV), có thể làm việc dưới nước trong thời gian dài, trong môi trường khắc nghiệt. ROV ứng dụng trong đặt, tháo gỡ bom mìn, thủy lôi 46; Tuần tra, đảm bảo an ninh, cứu hộ; Thăm dò mỏ dầu khí, khoáng sản; Đóng mở van, lắp đặt sửa chữa đường ống, bảo trì giàn khoan; Đào rãnh, lắp đặt, kiểm tra tình trạng cáp ngầm; Thu thập thông tin địa hình, sinh học biển; Khảo cổ dưới nước, thăm dò tàu đắm. ROV do nhóm chế tạo có các phiên bản VIAM-ROV500, VIAM-ROV900, KIAL-CROV, có khối lượng từ 25 – 70kg, kích thước 0,6 – 1m (dài) x 0,37 -0,6m (rộng), 0,4 – 0,9 m (cao), tốc độ tối đa 2 knots.
Robot ngầm tự hành (AUV), là bản cải tiến của ROV, là một phương tiện không người lái có khả năng tự hành cao cho các ứng dụng dưới nước. Chủ yếu có dạng ngư lôi với động cơ đẩy và cánh lái, có tính tự điều khiển. AUV được trang bị các thiết bị cảm biến, phục vụ đa dạng tác vụ cho mục đích quân sự và dân dụng như xây dựng bản đồ đáy biển; Khảo sát, giám sát theo từng khu vực; Thăm dò bề mặt địa chất, thu thập thông tin về các mỏ, khoáng sản; Phát hiện, tiêu diệt các mục tiêu dưới nước, rà phá bom mìn… AUV với độ sâu di chuyển 100m, có khối lượng 31,5kg, kích thước 0,18m x 1,67m, tốc độ 3 knots.
Hiện, nhóm tác giả làm chủ công nghệ chế tạo những thiết bị nói trên, có thể chuyển nhượng quyền sử dụng hoặc chuyển giao công nghệ toàn phần cho các đơn vị có nhu cầu.