Bằng các camera lắp trên thiết bị leo dây cáp, có thể phát hiện tất cả các bất thường, hỏng hóc của cầu cáp treo ngay khi sự cố xảy ra nhằm đảm bảo an toàn cho công trình.
Phát hiện hư hỏng của cáp cầu treo từ xa
TS Nguyễn Văn Quang, Viện Cơ học, Viện Hàn lâm Khoa học và Công nghệ Việt Nam, cho biết, ngày nay các kết cấu mới và hiện đại như cầu, nhà cao tầng, tháp cao, cần trục... đều được lắp đặt các hệ thống giám sát kết cấu để theo dõi nhiều thông số khác nhau như độ nghiêng, nhiệt độ, độ ẩm, dao động.
Để giám sát an toàn các công trình này, thế giới bắt đầu phát triển những thiết bị tự hành gắn camera có thể leo dây cáp để truyền tín hiệu hình ảnh về trung tâm quan sát.
Tuy nhiên, các thiết bị này chủ yếu quan sát bằng hình ảnh bên ngoài của dây cáp và vẫn đang trong quá trình thử nghiệm. Trong khi đó việc giám sát và đánh giá sự suy giảm độ bền kéo của cáp thông qua các đặc trưng khác của cáp như biên độ dao động, tần số dao động của cáp đều chưa được ứng dụng.
Từ những yêu cầu thực tiễn trên, TS Nguyễn Văn Quang và nhóm nghiên cứu Viện Cơ học đã tiến hành Đề tài “Nghiên cứu, phát triển hệ thiết bị leo dây cáp nhằm giám sát và phát hiện hư hỏng của cáp cầu treo”. Đây là hướng đi đầu tiên của nhóm mà các nghiên cứu trên thế giới chưa từng đề cập.
TS Nguyễn Văn Quang cho biết, mục tiêu của nhóm nghiên cứu là thiết kế, phát triển thiết bị leo dây cáp để giám sát, phát hiện từ xa các hư hỏng của cáp cầu treo nhằm đảm bảo an toàn cho hoạt động của cầu treo.
Các chức năng chính của thiết bị là quan sát bề mặt cáp bằng camera nhằm phát hiện hư hỏng trên bề mặt. Đo đạc các đặc trưng động lực học của cáp như biên độ dao động, tần số dao động dọc theo chiều dài cáp để đánh giá, phát hiện sự suy giảm độ bền kéo của cáp.
Thiết bị tự leo dây cáp cầu treo mang theo thiết bị thu thập dữ liệu phục vụ giám sát hư hỏng dây cáp từ xa được gọi là robot leo cáp. Robot leo cáp được chia làm bốn loại dựa trên phương pháp bám trên cáp, đó là phương pháp bám dính bằng từ tính, bằng khí nén, bằng điện, và bằng lò xo.
Nhóm đã chọn nghiên cứu cảm biến gia tốc MEMS MPU-6050. Đây là loại cảm biến phổ thông, giá thành thấp và có sẵn trên thị trường Việt Nam. Các bộ phận MPU-6050 là cảm biến MotionTracking đầu tiên trên thế giới được thiết kế cho các yêu cầu năng lượng thấp, chi phí thấp và hiệu suất cao của điện thoại thông minh, máy tính bảng và cảm biến đeo được.
MPU-6050 kết hợp chương trình MotionFusion™ của InvenSense và chương trình cơ sở hiệu chuẩn thời gian chạy cho phép các nhà sản xuất loại bỏ việc lựa chọn, chất lượng và tích hợp mức độ hệ thống của các thiết bị rời rạc trong các sản phẩm hỗ trợ chuyển động, đảm bảo rằng thuật toán hợp nhất cảm biến và quy trình hiệu chuẩn mang lại tối ưu hiệu suất cho người tiêu dùng.
Để robot chịu được tác động của môi trường
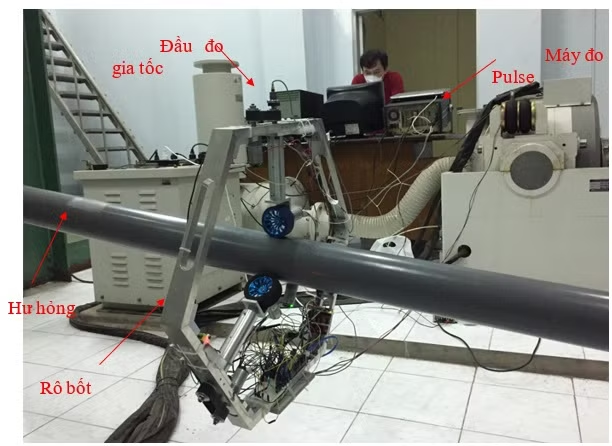
Kết quả của đề tài đã chế tạo được hệ thiết bị leo dây cáp nhằm giám sát và phát hiện hư hỏng của cáp cầu treo bao gồm: Cảm biến đo dao động 3 chiều, 3 cảm biến quan sát camera, thiết bị thu phát tín hiệu qua wifi và 4G, phần mềm điều khiển truyền phát và xử lý tín hiệu dao động từ cảm biến về trung tâm xử lý CABLEHM2020, phần mềm nhận dạng hình ảnh để phát hiện hư hỏng bằng hình ảnh từ camera.
Hệ thống đã được thử nghiệm tại Phòng Thí nghiệm Cơ học công trình, Viện Cơ học và so sánh với thiết bị đo và xử lý dao động PULSE của hãng Brüel & Kjær của Đan Mạch. Hệ thống đã được đo thử nghiệm tại cầu treo Trung Hà, tỉnh Hòa Bình.
Đây là cây cầu bắc qua khu vực hồ giữa hai xã Trung Hòa và Ngòi Hoa, huyện Tân Lạc, tỉnh Hòa Bình. Kết quả cho thấy tín hiệu dao động từ cáp cầu treo Trung Hà đã được truyền không dây về máy tính và xử lý online. Các kết quả đo và phân tích tín hiệu dao động của cáp cho thấy hệ thống cảm biến hoạt động tốt, có khả năng giám sát tốt các hư hỏng của cáp cầu treo.
Nhóm nghiên cứu cũng đã chế tạo được mô hình robot leo cáp trong phòng thí nghiệm nhằm giám sát và phát hiện hư hỏng của dây cáp cầu dây văng, cầu treo.
Theo TS Nguyễn Văn Quang, để có thể thương mại hóa sản phẩm cần thiết phải tiếp tục nghiên cứu để chế tạo robot có khả năng điều chỉnh lực cân bằng trên 3 bánh xe, để các bánh xe chuyển động theo quỹ đạo thiết kế trước, đồng thời robot phải có khả năng chịu được tác động của môi trường như mưa gió, ăn mòn...
Ngoài ra, nhóm sẽ tiếp tục phát triển các phương pháp phân tích tín hiệu hình ảnh và dao động để có thể đánh giá được chính xác nhất hiện trạng của dây cáp trong thực tế.