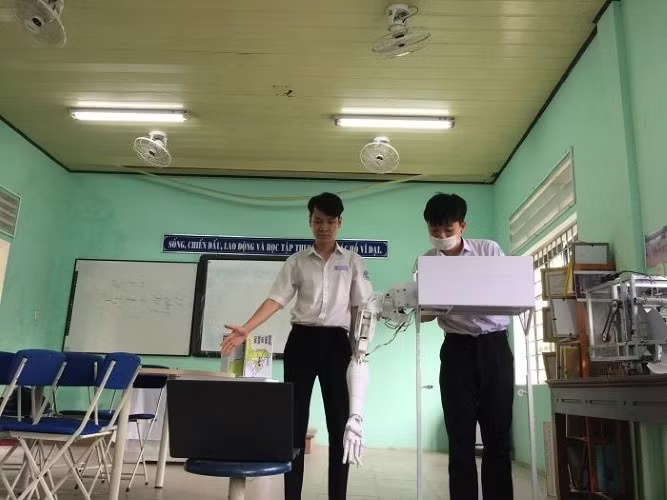
Đề tài “Nghiên cứu điều khiển cánh tay robot dựa trên nhận dạng cử chỉ tay người” của hai nam sinh đã được hội đồng đánh giá cao.
Giảm nguy cơ thương tật trong môi trường độc hại
Cuộc thi KHKT cấp quốc gia học sinh trung học năm học 2021 - 2022 diễn ra từ 25 - 27/3 bằng hình thức trực tuyến. Đã có 273 học sinh với 144 dự án ở 22 nhóm lĩnh vực, thuộc 71 đơn vị trên toàn quốc tham gia (60 sở GD&ĐT và 11 trường THPT thuộc các trường đại học).
Tại kỳ thi năm nay, tỉnh Thừa Thiên - Huế tham dự 2 đề tài: “Nghiên cứu điều khiển cánh tay robot dựa trên nhận dạng cử chỉ tay người” của Võ Tá Thành Minh - Nguyễn Khoa Hùng (Trường THPT Phú Bài, thị xã Hương Thủy) và “Nghiên cứu tác dụng bảo vệ tế bào HEK293 của liquiritin trong tổn thương thận cấp” của Trần Ngọc Anh Thư - Lê Ngọc Nhật Anh (Trường THPT chuyên Quốc học Huế).
Kết quả, Đề tài “Nghiên cứu điều khiển cánh tay robot dựa trên nhận dạng cử chỉ tay người” của Võ Tá Thành Minh (lớp 12B4) - Nguyễn Khoa Hùng (lớp 11B2) (Trường THPT Phú Bài) xuất sắc giành giải Nhì.
Nguyễn Khoa Hùng cho biết, từ nhiều năm trước, em đã chứng kiến việc làm thí nghiệm của các nhà khoa học trong phòng thí nghiệm vẫn có những sai sót, dẫn đến thương vong. Trong đại dịch, con người làm việc tiếp xúc với môi trường độc hại có thể nhiễm virus bất cứ lúc nào.
Qua đó, em nảy sinh ý tưởng chế tạo một cánh tay robot thay thế con người làm việc trong những môi trường độc hại nhằm giảm thiểu tiếp xúc trực tiếp, hạn chế thương vong.
“Cánh tay robot này sẽ hỗ trợ con người trong các hoạt động mà chúng ta không thể làm trực tiếp như phòng thí nghiệm, khu vực cháy nổ hay tiếp xúc với hóa chất, vi khuẩn độc hại, có ảnh hưởng lớn đến sức khỏe… Ngoài ra, cánh tay robot có thể thực hiện được nhiều việc khác nhau như có thể nâng vật nặng trong khu vực sản xuất thay thế các bộ phận chân, tay của người khuyết tật, hỗ trợ chăm sóc người già….”, Hùng chia sẻ thêm.
Theo Võ Tá Thành Minh, trước đó đã có nhiều nghiên cứu thiết kế và điều khiển cánh tay robot bằng các phương pháp khác nhau nhằm phục vụ cho nhiều mục đích. “Đề tài nghiên cứu về cánh tay robot này khác với những cánh tay robot trước đó.
Cánh tay robot của chúng em được thiết kế và hoạt động dựa trên công nghệ nhận dạng cử chỉ tay người để từ đó điều khiển, đó là điều đặc biệt. Hiện nay, công nghệ nhận dạng và xử lý ảnh đã có nhiều đột phá mới với việc ứng dụng sâu các kỹ thuật AI (trí tuệ nhân tạo) nhằm nâng cao độ chính xác”, em Minh nói.
Ngay sau khi lên ý tưởng, Hùng và Minh đã bắt tay vào nghiên cứu, phân tích ưu, nhược điểm của các phương pháp điều khiển cánh tay robot trên thế giới và tại Việt Nam, tiếp đó, hai em tìm hiểu về các tài liệu liên quan đến lập trình, trí tuệ nhân tạo rồi lựa chọn linh kiện điện tử, lắp đặt và thử nghiệm…
Với sự hỗ trợ của các giáo viên và gia đình, sau hơn 6 tháng mày mò, nghiên cứu, Hùng và Minh đã hoàn thành cánh tay robot này và xuất sắc giành giải Nhì của cuộc thi KHKT cấp quốc gia năm học 2021 - 2022.
Cánh tay robot ứng dụng trí tuệ nhân tạo AI
Ông Hoàng Minh – Hiệu trưởng Trường THPT Phú Bài, TX Hương Thủy (tỉnh Thừa Thiên – Huế) là giáo viên trực tiếp hướng dẫn cho Khoa Hùng và Thành Minh. Ông cho biết, “nghiên cứu điều khiển cánh tay robot dựa trên nhận dạng cử chỉ tay người” sử dụng phương pháp gia công mô hình bằng công nghệ in 3D và trí tuệ nhân tạo.
Phương thức hoạt động của cánh tay robot là điều khiển bằng sóng vô tuyến thông qua phương thức này giúp cánh tay robot dễ dàng di chuyển trong các môi trường khác nhau. Quá trình thực hiện, thông qua phương pháp in 3D, Hùng và Minh đã lắp ráp thành công cánh tay robot theo bản thiết kế tham khảo. Trong đó, các bậc chuyển động tự do của cánh tay là tương tự tay người.
Cũng theo ông Minh, khi được đưa vào thử nghiệm, cánh tay robot đã kết nối thành công phần mềm nhận dạng cử chỉ tay (Media Pipe) thông qua các bộ vi mạch điện tử.
Bên cạnh đó, cánh tay cũng đã lập trình thành công việc truyền tín hiệu từ phần mềm nhận dạng đến cánh tay robot để điều khiển cánh tay robot chuyển động theo cử chỉ của tay người. Đồng thời đã kiểm tra thử hoạt động của cánh tay một cách chính xác, ổn định, có thể cầm nắm được nhiều loại đồ vật khác nhau.