Mới đây, các nhà khoa học đã chế tạo thành công phiên bản robot cá riêng biệt với hệ thống cơ quan đường bên. Nhờ đó, giúp robot xác định tốc độ bơi tốt nhất. Bài báo về nghiên cứu gần đây đã được xuất bản trên tạp chí “Hệ thống thông minh tiên tiến”.
Nghiên cứu có sự tham gia của các nhà nghiên cứu từ Viện Max Planck về Hệ thống Thông minh (Đức), Đại học Quốc gia Seoul (Hàn Quốc) và Đại học Harvard (Mỹ). Họ đã tạo ra một robot lấy cảm hứng từ cá thân mềm, có thể bơi tại chỗ ngược dòng nước.
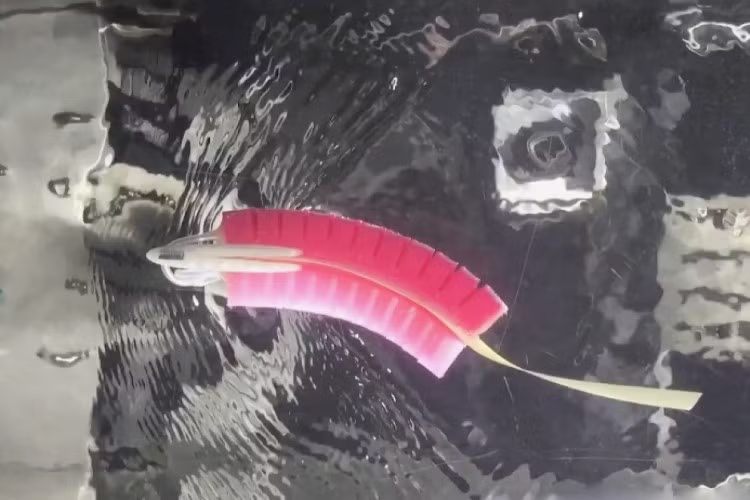
Chuyển động bơi nhấp nhô của robot cá được thực hiện nhờ một loạt các khoang silicone liên kết, nằm dọc theo hai bên cơ thể. Không khí luân phiên được bơm vào các khoang ở một bên và ra khỏi các khoang ở bên kia. Điều này làm cho bên được bơm căng nở và phình ra ngoài, trong khi bên bị xì hơi cong vào trong.
Hệ thống cơ quan đường bên của robot bao gồm hai kênh silicone siêu nhỏ chứa đầy kim loại lỏng, chạy theo chiều dài của mỗi bên. Trong khi mặt của cơ thể cong, điện trở của kim loại lỏng bên trong sẽ tăng lên. Do đó, bằng cách theo dõi sự thay đổi của lực cản, các nhà khoa học có thể xác định được mức áp suất không khí nhất định đã khiến cơ thể của robot uốn lượn.
Các nhà khoa học đã tiến hành thiết lập một vòng lặp tự học. Trong đó, một máy tính kết nối với robot đo vận tốc thay đổi của dòng nước.
Sau đó, tự động điều chỉnh áp suất không khí để đáp ứng với thông tin đó. Quá trình này cho phép robot liên tục duy trì tốc độ bơi phù hợp với tốc độ hiện tại. Trong môi trường tự nhiên như sông, phương pháp này sẽ giúp robot không bị cuốn xuống hạ lưu khi không tiến về phía trước.
Tiến sĩ Ardian Jusufi của Max Planck cho biết: “Robot này sẽ cho phép chúng tôi kiểm tra và tinh chỉnh các giả thuyết liên quan đến cơ học thần kinh của động vật bơi lội, cũng như giúp chúng tôi cải thiện các robot dưới nước trong tương lai”.
Cũng theo chuyên gia này, bên cạnh việc lần đầu tiên mô tả đặc tính của cảm biến dạng mềm trong điều kiện nước, các nhà khoa học đã phát triển một phương pháp mô hình hóa theo hướng dữ liệu đơn giản và linh hoạt. Nhờ đó, giúp thiết kế bộ điều khiển phản hồi bơi trong tương lai.