Công cụ này có chức năng hỗ trợ tăng cường cảm nhận sức căng (SPS). Từ đó, giúp nhận ra sự chuyển đổi từ xúc giác sang cảm nhận cơn đau. Nghiên cứu đã được công bố trên Tạp chí Advanced Function Materials.
Các sinh vật có mô mềm sinh học (ví dụ: da) có thể đạt được khả năng tự bảo vệ thông qua sự căng cứng cơ học thụ động và nhận thức chủ động về những kích thích bên ngoài.
Trước khi căng cứng cơ học, lớp bảo vệ tích cực có thể cảm nhận trước nguy hiểm. Từ đó, làm giảm đáng kể nguy cơ chấn thương. Tuy nhiên, vẫn còn nhiều thách thức để đạt được sự bảo vệ tích cực hiệu quả.
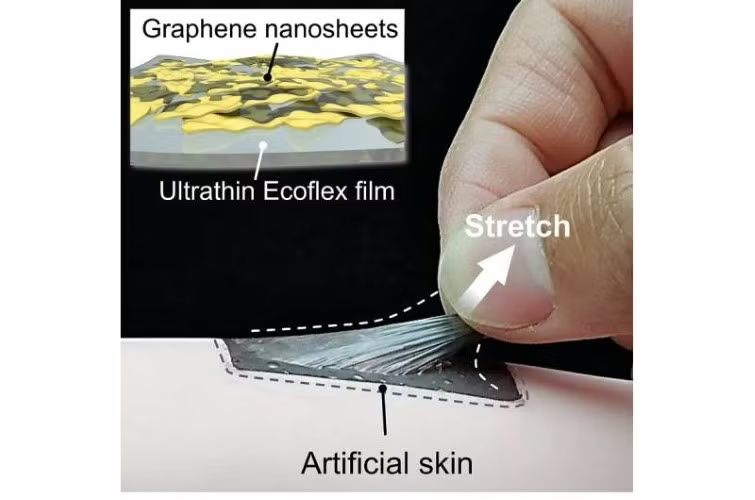
Để giải quyết vấn đề này, các nhà nghiên cứu tại NIMTE đã chuẩn bị một loại da mô phỏng sinh học mới. Đây là một màng đàn hồi và dẫn điện (ECF). Loại da này bao gồm màng mỏng đàn hồi và các tấm nano graphene.
Chúng được lắp ráp với giao diện cấu trúc lồng vào nhau. Hiệu ứng SPS mang lại làn da mềm mại với chức năng chuyển đổi động, từ xúc giác sang cảm nhận cơn đau.
ECF dựa trên graphene hai chiều (2D) thể hiện mối tương quan thuận giữa hệ số đo và độ căng, tương tự hệ thống giác quan của sinh vật. Bên cạnh đó, da mô phỏng sinh học tổng hợp có thể đạt được nhận thức xúc giác bình thường trong điều kiện sức căng thấp và cảm nhận đau trên ngưỡng căng thẳng.
Ngoài ra, giá trị ngưỡng cảm nhận biến dạng có thể được điều chỉnh từ ~ 7,2% đến ~ 95,3%. Điều đó cho thấy, tiềm năng lớn trong việc phát triển các ứng dụng đa dạng liên quan đến SPS.
Hệ thống cảm giác hỗ trợ SPS có thể mô phỏng hiệu quả cảm giác đau của các mô người trong những trường hợp như sự co giãn quá mức một chiều của gân cơ và biến dạng co duỗi không đều của da tay.
Lấy cảm hứng từ loài cá nóc, các nhà khoa học tại NIMTE đã thiết kế một mô hình sinh học dựa trên ECF làm da nhân tạo tự hỗ trợ. Nhờ đó, phát hiện các kích thích cơ học không tiếp xúc và tiếp xúc. Đồng thời, chủ động tự phồng lên thành dạng 3D.
Biến dạng 3D quá mức có thể được ghi lại một cách hiệu quả nhờ hiệu ứng SPS điển hình. Các nhà khoa học nhận định, công nghệ mới cho thấy triển vọng trong các lĩnh vực tương tác giữa người và máy, chân tay giả thông minh và robot.